
Blood Flow Sensor
With positive displacement pumps, the blood flow flux through the pump is determined solely by the pump speed. However, with centrifugal flow pumps that rotate at set speeds, the flow rate through the pump also depends on the upstream and downstream pressures. Therefore, an external sensor is required to provide the blood flow rate information.
The sensors work by by measuring the transit-time of ultrasonic pulses through the blood flow. The flow sensor surrounds the ECMO circuit tubing. Ultrasonic impulses are sent from one piezo crystal to another (either directly in an X-pattern or by a reflector with the crystals acting alternately as transmitters and receivers depending on the manufacturer). The transit time taken by each impulse is determined, and the differences times taken by the impulses flowing upstream and the ones flowing downstream are proportional to the flow rate.
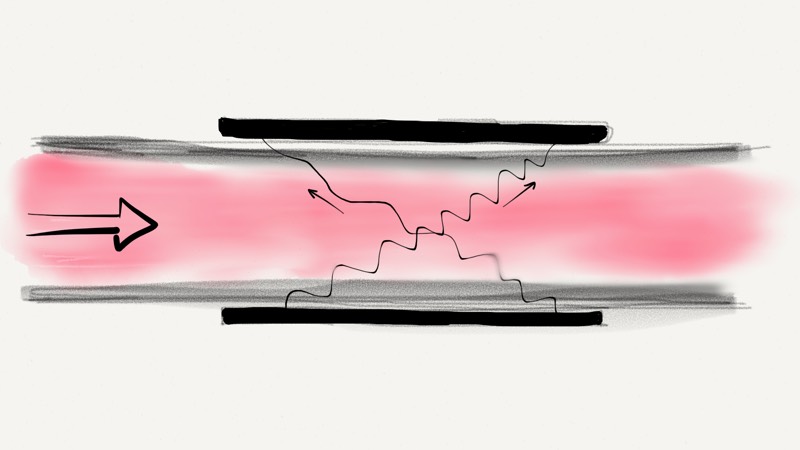
Even though the physical path lengths of the ultrasound beams within the the sensor are the same, the transit time is longer for the beam going upstream is longer because of the Doppler effect. An object moving towards the ultrasonic beam compresses the wave, thereby increasing the signal’s frequency, whereas an object moving away from the beam reduces the signal’s frequency. The change in frequency, which is also termed the Doppler shift, provides information about the object’s speed and direction of motion.
Bubble Detection Sensor
Bubble detection is critical to maintain the steady-flowing circuit and prevent complications from air embolism especially with veno-arterial ECMo circuits. Non-invasive ultrasonic bubble sensor uses an active piezoelectric element as a piezoelectric transmitter to generate a high frequency acoustic wave. This acoustic wave travels through the sensor wall and is coupled (using coupling paste) to the tubing that is in contact with that wall. The wave then travels through the fluid-filled tubing to the opposite sensor wall and is received by a passive piezoelectric element on the other side (figure below).
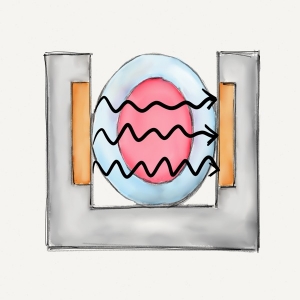
The ability to sense when air is present is due to the large acoustic impedance difference that exists between the tubing wall or fluid and air (igure below). This large impedance mismatch creates an acoustic mirror which reflects the ultrasonic wave back in the direction of the transmitter. Since energy does not reach the receiver side, the sensor will indicate the presence of air.
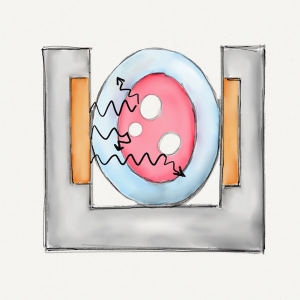
Blind spots are areas within the tubing that do not lie in the acoustic path. Since they are not in the acoustic path, air bubbles that pass through these locations do not attenuate the acoustic signal and will go undetected. Most orientations are likely to detect bubbles under rapid flow conditions because fluid flow tends to center the bubble. However, under low flow conditions buoyancy will apply a force against gravity, potentially locating a bubble in a blind spot area. A horizontal sensor with vertical tubing, allows for a drifting bubble to travel faster and center itself within the tubing.
Another method for optimizing bubble detection is to clamp the tubing into the sensor channel to compress it to more of a square shape. This maximizes the acoustic window, and minimizes the blind spots which reduces the risk of undetected bubbles. This method also minimizes the effects of pressurized tubing which is important on the outflow side of a veno-arterial ECMO circuit. This method may not always be practical, but is highly recommended when possible.
Contribute your thoughts.